

Beyond Human Error: How self driving cars solve traffic congestion?
Exploring how Autonomous Vehicles reducing congestion and revolutionize how we use public networks.

Introduction
With inherent limitations, human drivers are often the root cause of traffic congestion and accidents. We are highly inefficient in almost all aspects of driving as opposed to self-driving vehicles. We hesitate, overreact, get distracted, and frequently prioritize emotion over logic. These inefficiencies contribute to a global epidemic of traffic congestion and accidents that cost billions of dollars in wasted time and fuel, environmental damage, and tragically claim millions of lives annually [1].
Traditional solutions (mentioned below) won't solve traffic congestion issues either, for example:
widening roads, increasing the number of lanes, making more roads and bridges
increasing public transportation
increasing driving test difficulty levels and awareness among the drivers.
More lanes incentivize more driving, leading to more traffic on these roads. On the contrary, the best way to reduce over-speeding and reckless driving is to reduce the lane width. The root of the problem lies not in infrastructure but in human fallibility, our inability to effectively manage the complex coordination required for smooth traffic flow. Our susceptibility to distractions, unpredictable decision-making, and slow reaction times contribute to the stop-and-go patterns that plague our roadways.
Traffic Shockwave Jams: Experimental Replication and Insights
Researchers from several Japanese universities conducted a study where they constructed a 230-meter single-lane circular track and introduced 22 vehicles, instructing the drivers to maintain a constant speed of 30 kilometers per hour.
Initially, as one might expect, traffic flowed smoothly. However, subtle fluctuations in the distances between vehicles soon emerged, disrupting the equilibrium. These minor variations in speed and spacing triggered a chain reaction, ultimately leading to a cluster coming to a complete stop.
This localized stoppage acted as a catalyst for a phenomenon known as a shockwave jam. Like ripples in a pond, the jam propagated backward through the traffic flow, with vehicles at the rear forced to brake and join the growing cluster. Even when drivers at the front of the jam accelerated to escape, reaching speeds of up to 40 km/h, new vehicles were continually added to the back, perpetuating the congestion.
The researchers observed that this shockwave jam traveled backward through the ring of vehicles at approximately 20 km/h. Remarkably, the shockwave speed mirrored that of shockwave jams observed in real-world traffic scenarios, as noted by lead researcher Yuki Sugiyama, a physicist from the Department of Complex Systems, Nagoya University.
This experiment demonstrated how minor fluctuations in driver behavior can cascade into significant traffic disruptions, highlighting the inherent limitations of human-driven traffic systems.
Solution
Self-driving cars have the potential to alleviate traffic congestion by optimizing traffic flow, reducing accidents caused by human error, and increasing road capacity. While the widespread adoption of this technology may face challenges, the potential benefits for our society and our planet are undeniable. Imagine a world where traffic flows smoothly, accidents are rare, and commutes are predictable and stress-free.
How do self-driving cars solve traffic congestion and provide a safer driving experience?
Vision
A self-driving car like Tesla uses detection systems that see its environment better than human eyesight.
Our seemingly expansive field of vision presents significant limitations while driving. Our peripheral vision does offer some awareness of movement and large objects on the periphery, yet our focused, decision-making vision is restricted to a surprisingly narrow sector directly ahead. It creates a perceptual blind spot, leaving significant portions of our surroundings unobserved. Essentially, we are navigating a complex and dynamic environment with a tunnel-like perspective, relying heavily on mirrors and glances to compensate for this inherent visual constraint. This fragmented awareness can lead to delayed reactions and misjudgments, thus increasing risk on the road.
While rear-view and side-view mirrors offer a glimpse beyond our immediate field of vision, they necessitate a constant focus shift, briefly diverting attention from the road ahead. This setup creates a crucial vulnerability, as even momentary lapses in forward vigilance can prove fatal. Furthermore, our interpretation of information from mirrors relies heavily on intuition and estimation, as the human eye struggles with precise depth perception. This inherent limitation hinders the accurate assessment of the approaching vehicle's speed and distance or the judgment of the ideal moment for a lane change or merge.
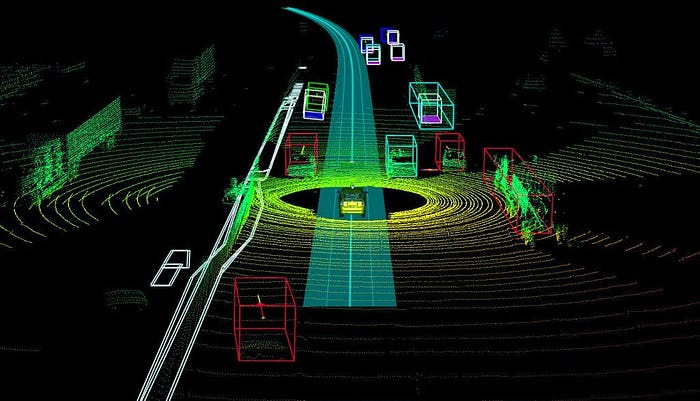
A self-driving vehicle, on the other hand, is equipped with sensors like cameras, lidar, radar, and inertial measurement units of varying ranges that work together to provide an accurate picture of the surroundings and help it detect the shape, speed, direction, and distance of nearby objects (vehicles, pedestrians, animals). These systems are present on all sides of the car, giving it an accurate picture of its surroundings in real-time from all directions simultaneously.
Radar sensors can supplement camera vision in times of low visibility, like night driving, and improve detection for self-driving cars.
Lidar sensors are a crucial instrument for providing full self-driving capabilities. Lidar is a sensor that can measure distances by pulsing lasers. Lidar allows the car to build a 3D model of its complete surrounding point cloud, including objects and road geography. It also works well in low-light conditions.

Processing Power
Data from these inputs is fed into a high-performance centralized AI system that decides what the car should do next. Receiving data from both camera and radar sensors immensely improves the safety of the maneuver.
While a human brain can process only about 11 million bits per second of input, a high-performance system can process trillions of bits per second based on their specifications.
Decision Making
The decision-making process within a self-driving car is a complex ballet of information processing and algorithmic orchestration. It begins with the raw data collected from an array of sensors – cameras, lidar, radar, and inertial measurement units. This data, encompassing everything from the location and motion of the vehicle itself to the positions, speeds, and trajectories of surrounding objects, is like the raw notes of a musical score. The raw data is processed meticulously into a comprehensive understanding of the environment. It includes identifying and classifying static and dynamic objects, mapping the road topography, and interpreting traffic signals.
However, the vehicle's perception of its environment doesn't solely rely on its sensors. It also utilizes high-definition maps, accurate down to the lane level, as a supplemental source of information. These maps provide critical details about the road layout, lane markings, speed limits, and other relevant features. It is akin to adding a conductor's score to the orchestra, providing additional guidance and context to the musical performance.
With this wealth of information at its disposal, the decision-making system can begin to compose its actions. It accounts for numerous constraints and factors, such as the surrounding environment, local traffic regulations, the vehicle's current status, the planned path, historical decisions, and even driving ethics.
The system then generates high-level behaviors, such as merging, overtaking, lane keeping, and lane changing. These are like the broad strokes of a musical composition, outlining the overall direction and mood.
Finally, the system translates these high-level behaviors into precise low-level control commands. These commands, which include longitudinal velocity, acceleration, angular velocity, and acceleration, are the individual notes that the car's actuators play, resulting in the actual movement of the vehicle.
The entire process executes in real time with an emphasis on safety, efficiency, and ride comfort. The car must constantly evaluate its surroundings, predict the actions of other road users, and make split-second decisions to ensure a smooth and safe journey.
Result
Optimized Traffic Flow
Unlike human drivers, self-driving cars can communicate with each other and with traffic control systems to optimize traffic flow. It allows them to adjust speed and direction to avoid collisions and optimize traffic flow. By reducing the number of stops and improving traffic flow, self-driving cars can reduce congestion and travel time.
Even if a batch of self-driving cars are at a traffic signal, they can coordinate and move forward in the most efficient way possible to clear the congestion in the duration offered by the traffic signal.
Reduced Human Error and Faster Reaction Times
Self-driving cars can eliminate human error, a primary cause of traffic accidents. By eliminating the need for human drivers, self-driving cars can reduce the number of accidents caused by distracted driving, speeding, and other risky behaviors. It can lead to a safer and more efficient transportation system. Self-driving cars can react to potential hazards much faster than humans, thanks to their sensors and cameras that can simultaneously monitor the road in all directions. It can help them avoid accidents that would otherwise cause traffic delays. Even though this is not the most accurate description, you can think of it this way.
Disclaimer
While autonomous vehicles certainly provide a safer and more efficient alternative to human drivers, this article doesn’t claim that these vehicles fully solve traffic congestion and accident issues.
References
King JA Jr. What percentage of car accidents are caused by human error? Morris, King & Hodge, P.C. Published March 6, 2024. https://www.mkhlawyers.com/blog/what-percentage-of-car-accidents-is-caused-by-human-error/
M. Shipman, “Self-Driving cars can make traffic slower,” NC State News. https://news.ncsu.edu/2023/08/self-driving-cars-can-make-traffic-slower/
“Will autonomous driving reduce traffic congestion? | LinkedIn,” Mar. 20, 2023. https://www.linkedin.com/pulse/autonomous-driving-reduce-traffic-congestion-chaehoon-lee/
K. Edward, “Goodbye Gridlock: How Autonomous vehicles can Revolutionize city living,” Forbes, Jul. 31, 2023. [Online]. Available: https://www.forbes.com/sites/kyleedward/2023/07/29/goodbye-gridlock-how-autonomous-vehicles-can-revolutionize-city-living/?sh=1ea5eae21588
“Lens: Expert topical commentary, pioneering research - Monash University,” Monash Lens, Mar. 30, 2023. https://lens.monash.edu/%40technology/2023/03/30/1385501/will-self-driving-cars-solve-the-problem-of-traffic-congestion
Pti, “Making self-driving cars future-ready! Shared autonomous vehicles can fix traffic congestion problem,” The Economic Times, Feb. 14, 2023. [Online]. Available: https://economictimes.indiatimes.com/magazines/panache/making-self-driving-cars-future-ready-shared-autonomous-vehicles-can-fix-traffic-congestion-problem/articleshow/97917299.cms
“Eliminating Traffic Jams with Self-Driving Cars | Civil and Environmental Engineering,” Mar. 15, 2021. https://ce.berkeley.edu/news/2537
“How autonomous vehicles reduce traffic congestion,” May Mobility, Aug. 10, 2023. https://maymobility.com/posts/reduce-traffic-congestion-large-cities/
K. Burke, “How does a Self-Driving car see? | NVIDIA blog,” NVIDIA Blog, Apr. 16, 2019. https://blogs.nvidia.com/blog/how-does-a-self-driving-car-see/
Q. Liu, X. Li, S. Yuan, Z. Li, School of Mechanical Engineering, Beijing Institute of Technology, and Department of Transport and Planning, Faculty of Civil Engineering and Geosciences, Delft University of Technology, “Decision-Making Technology for Autonomous Vehicles: Learning-Based Methods, applications and Future Outlook,” IEEE, [Online]. Available: https://arxiv.org/ftp/arxiv/papers/2107/2107.01110.pdf